SAS Viya:セマンティック・セグメンテーション(Semantic Segmentation)を試してみた

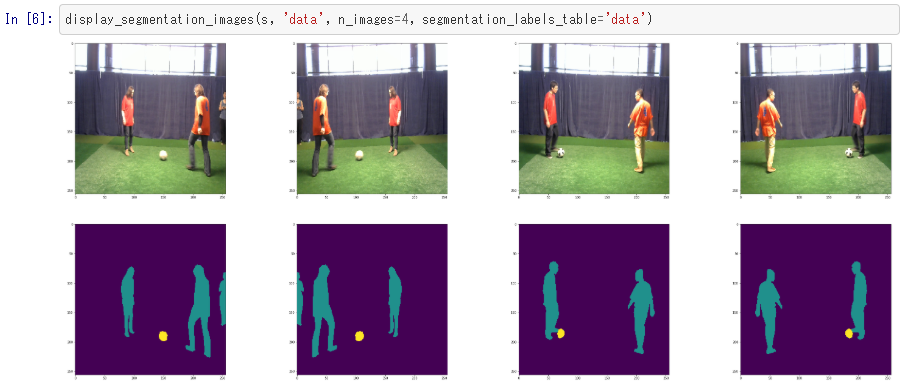
PythonからSAS Viyaの機能を利用するための基本パッケージであるSWATと、よりハイレベルなPython向けAPIパッケージであるDLPyを使用して、Jupyter NotebookからPythonでSAS Viyaの機能を使用してセマンティック・セグメンテーション(Semantic Segmentation)を試してみました。 大まかな処理の流れは以下の通りです。 1. 必要なパッケージ(ライブラリ)のインポートとセッションの作成 2. 画像データ内容の確認とセグメンテーション用データセットの作成 3. モデル構造の定義 4. モデル生成(学習) 5. セグメンテーション(スコアリング) 1. 必要なパッケージ(ライブラリ)のインポートとセッションの作成 swatやdlpyなど、必要なパッケージをインポートします。 %matplotlib inline # SWAT パッケージのインポート import swat as sw import sys # DLPy パッケージのインポート import dlpy from dlpy.network import * from dlpy.utils import * from dlpy.applications import * from dlpy.model